Відстеження відстані
Тепер, коли ми розглянули управління вмиканням-вимиканням, давайте використаємо цю інформацію для відстеження об’єкта з певної відстані.
Процес
По суті, ми хочемо, щоб наш робот рухався до об’єкта, якщо він занадто далеко, і віддалявся від об’єкта, якщо він занадто близько.
Ми можемо це зробити, використовуючи датчик відстані, щоб визначити, як далеко знаходиться об’єкт, а потім використовуючи цю інформацію, щоб визначити, в якому напрямку повинен рухатися робот.
Для цього завдання візьмемо цільову відстань 30 см.
from XRPLib.rangefinder import Rangefinder
rangefinder = Rangefinder.get_default_rangefinder()
distance = 30
while True:
if rangefinder.distance() < distance:
drivetrain.set_speed(-20, -20)
elif rangefinder.distance() > distance:
drivetrain.set_speed(20, 20)
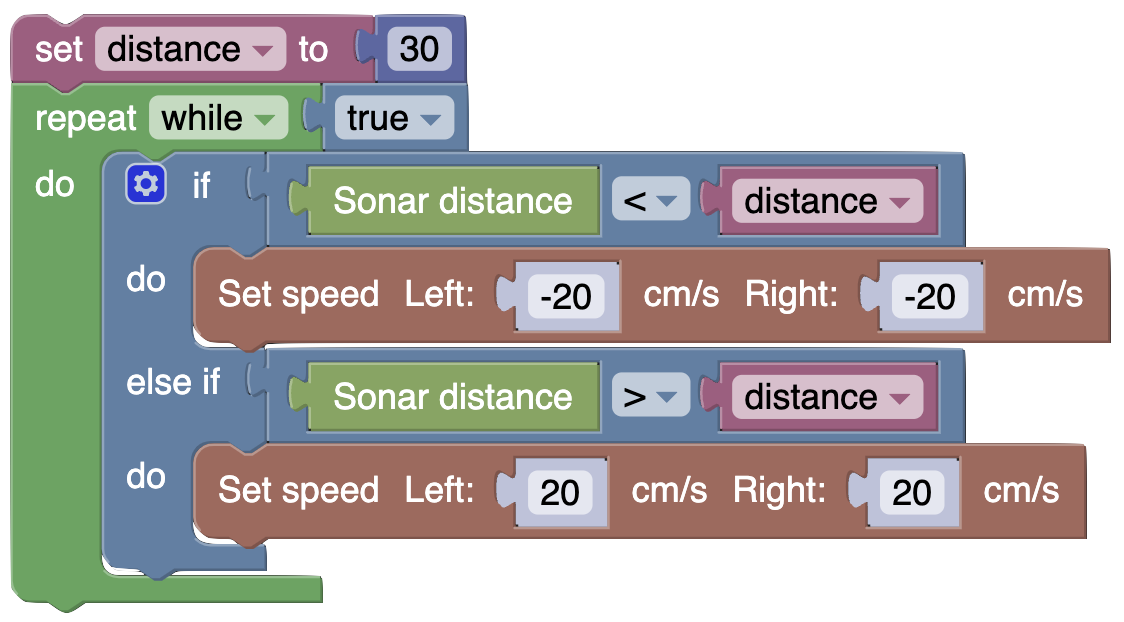
Ви помітите, що цей код змушує робота рухатися вперед і назад, або коливатися, оскільки відстань сонара постійно змінюється від більшої до меншої за 30 см. А що буде, якщо ми додамо третій випадок, який змусить двигуни робота зупинитися, коли відстань сонара дорівнюватиме 30 см?
from XRPLib.rangefinder import Rangefinder
rangefinder = Rangefinder.get_default_rangefinder()
distance = 30
while True:
if rangefinder.distance() < distance:
drivetrain.set_speed(-20, -20)
elif rangefinder.distance() > distance:
drivetrain.set_speed(20, 20)
else:
drivetrain.stop()
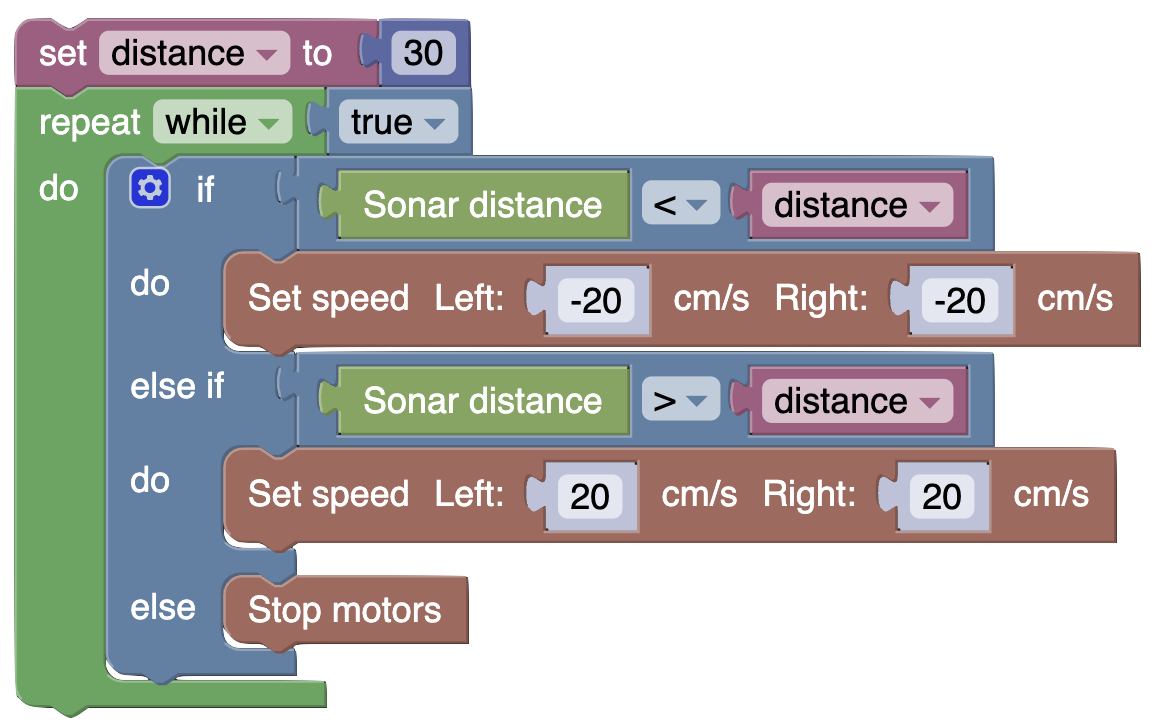
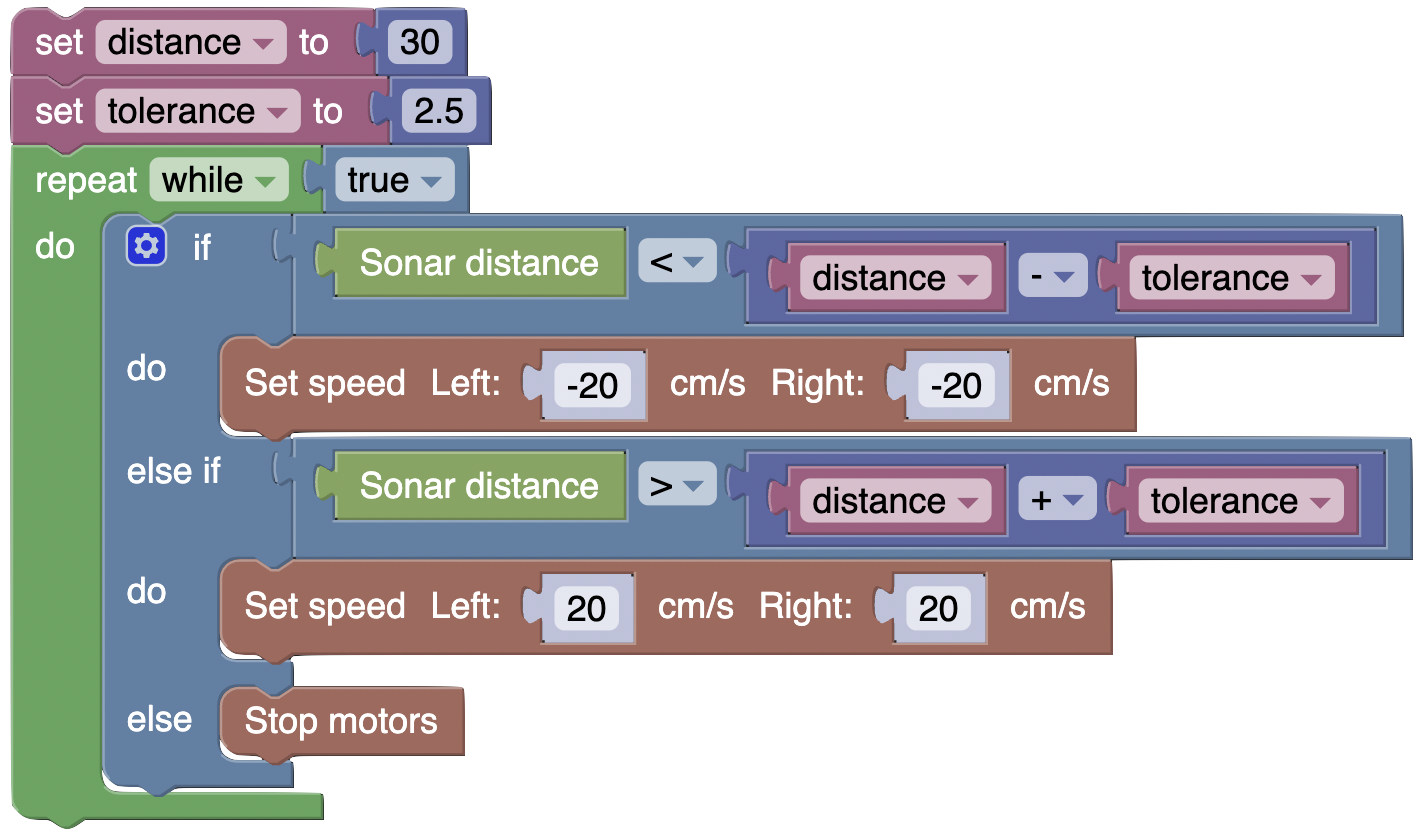
На жаль, навіть з цим кодом наш робот все одно не зупиняється! Проблема в тому, що датчик відстані настільки точний, що ніколи не показує точно 30 см. Ми можемо вирішити цю проблему, змусивши нашого робота зупинятися, коли він наближається до 30 см, а не точно досягає 30 см. Ми можемо це зробити, створивши діапазон, в якому наш робот зупиняється, який називається «мертвою зоною». Використовуючи діапазон +- 2,5 см, наш новий код буде виглядати так:
from XRPLib.rangefinder import Rangefinder
rangefinder = Rangefinder.get_default_rangefinder()
distance = 30
tolerance = 2.5
while True:
if rangefinder.distance() < distance - tolerance:
drivetrain.set_speed(-20, -20)
elif rangefinder.distance() > distance + tolerance:
drivetrain.set_speed(20, 20)
else:
drivetrain.stop()
Примітка
Зверніть увагу, що замість жорсткого кодування чисел, таких як 27,5 і 32,5, ми використовували змінні. Це дає нам дві переваги:
Ми можемо легко змінити бажану відстань і допуск без необхідності змінювати сам код.
Набагато простіше розшифрувати, що робить код, використовуючи «магічні» числа, такі як 27,5 і 32,5, які можуть заплутати читача, оскільки користувач повинен з’ясувати, що означають ці числа.
Цей код повинен дозволити роботу зупинитися, коли він відчуває відстань сонара ~30 см. Наша проблема зараз полягає в тому, що існує потенційна похибка 2,5 см від бажаної відстані слідування. На щастя, в наступному розділі ми дізнаємося про таке поняття, як «пропорційне регулювання»…