Що таке робот?
У цьому курсі ми говоримо про роботів як про пристрої, які можуть:
Сприймати своє оточення
Мислити та усвідомлювати, що відбувається навколо робота
Виконувати дії за допомогою приводів (двигунів)
Існує багато способів визначення робота, і це лише один з них. Проте, добре мати чітке визначення того, що таке робот. Давайте розглянемо різні пристрої та спробуємо вирішити, чи є кожен з них роботом відповідно до наших визначень.
Приклади
Радіокерований літак

Радіокерований літак керується людиною, яка тримає пульт управління і використовує джойстики для контролю траєкторії польоту літака. Для цього потрібен дистанційний пілот.
Приводи:
двигун пропелера
три двигуни керуючих поверхонь
Датчики: немає
Підсумок: немає датчиків, немає мислення, і він повинен повністю контролюватися людиною.
Це не робот.
Дрон

Квадрокоптер може управлятися дистанційно або літати в автономному режимі. Дрон може літати за запрограмованим маршрутом, оминати перешкоди, повертатися до місця посадки та автоматично приземлятися.
Приводи:
4 двигуни пропелера
двигун наведення камери
Датчики:
Приймач GPS (Глобальна система позиціонування)
гіроскопи та акселерометри
датчик курсу
датчик висоти
далекомір
Дрон відчуває навколишнє середовище на основі свого визначеного місцезнаходження та оточення і самостійно літає з одного місця в інше.
Це робот.
Пилосос

Звичайний пилосос оператор пересуває по приміщенню, щоб прибрати підлогу. Приводи: Двигун для обертання вентилятора, який всмоктує бруд.
Датчики:
Датчик швидкості вентилятора для забезпечення стабільної роботи.
Двигун має датчик, який підтримує його роботу на заданій швидкості, але він не відчуває навколишнє середовище і не має сприйняття. Оператор повинен забезпечити всю «розумність».
Це не робот.
Автономний пилосос

Автономний пилосос може самостійно запускатися, пилососити одну або кілька кімнат, повертатися до своєї базової станції для очищення, а потім продовжувати пилососити, поки вся робота не буде виконана. Він створює карту кожної кімнати в будинку для більш послідовної роботи.
Приводи:
Приводний двигун для коліс, щоб пересуватися.
Двигун для пилососа для прибирання.
Двигун в базі (не показаний), який висмоктує бруд з пилососа, щоб він міг продовжувати прибирання.
Датчики:
Камера для візуалізації кімнати.
Перемикачі на бампері, що дозволяють йому розвертатися після зіткнення з перешкодами.
Далекоміри з боків для вимірювання відстані від стін.
Датчик для розпізнавання килима та підлоги для зміни швидкості двигуна.
Автономний пилосос досить розумний. Він може вивчити карту будинку після декількох пробіжок і ефективно прибирати кімнати. Він може оминати перешкоди, прибирати кімнати, зупинятися для підзарядки і продовжувати роботу з того місця, де зупинився.
Це робот.
Автомобіль з автопілотом

Автомобіль з автопілотом може керуватися людиною у звичайному режимі або самостійно рухатися міськими вулицями та автомагістралями.
Приводи:
Колеса для руху.
Двигуни для керування поворотами.
Приводи, що дозволяють роботу самостійно гальмувати.
Датчики:
8 камер зовні та всередині автомобіля для спостереження за навколишнім середовищем та уважністю водія.
Далекоміри по всьому периметру автомобіля для вимірювання відстані до сусідніх транспортних засобів.
GPS для визначення місцезнаходження автомобіля та інше.
Автомобіль є інтелектуальним і представляє собою найсучаснішу робототехніку. Він може відчувати навколишнє середовище, розуміти, де він буде через певний час, і рухатися до місця призначення, безпечно оминаючи перешкоди.
Це робот.
З чого складається робототехніка?
Робототехніка зазвичай розглядається як поєднання трьох дисциплін. Це:
Машинобудування — проектування та аналіз механізмів та інших механічних систем.
Електротехніка — проектування електронних схем, особливо всіх датчиків.
Інформатика — розробка сучасного програмного забезпечення (комп’ютерних програм) для інтерпретації всіх даних датчиків, їх розуміння та керування виконавчими механізмами.
Робототехніку можна розглядати як синергію цих трьох галузей. Проектування роботів вимагає «системного» підходу до проектування. Знання всіх трьох дисциплін дозволяє розробляти більш складні та функціональні системи, ніж ті, що базуються лише на одній з них.
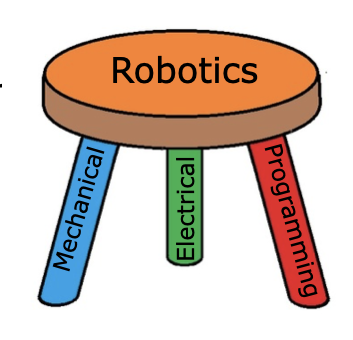
Робототехніка — це триногий стілець. Без будь-якої з цих дисциплін він падає.